Carrito







PARA INTERIOR E INTEMPERIE
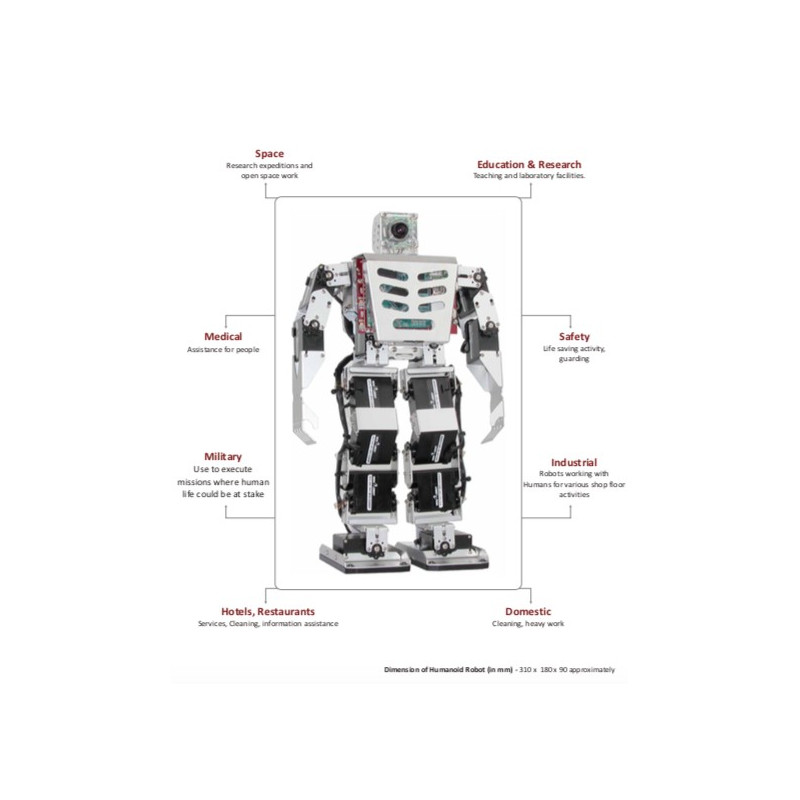
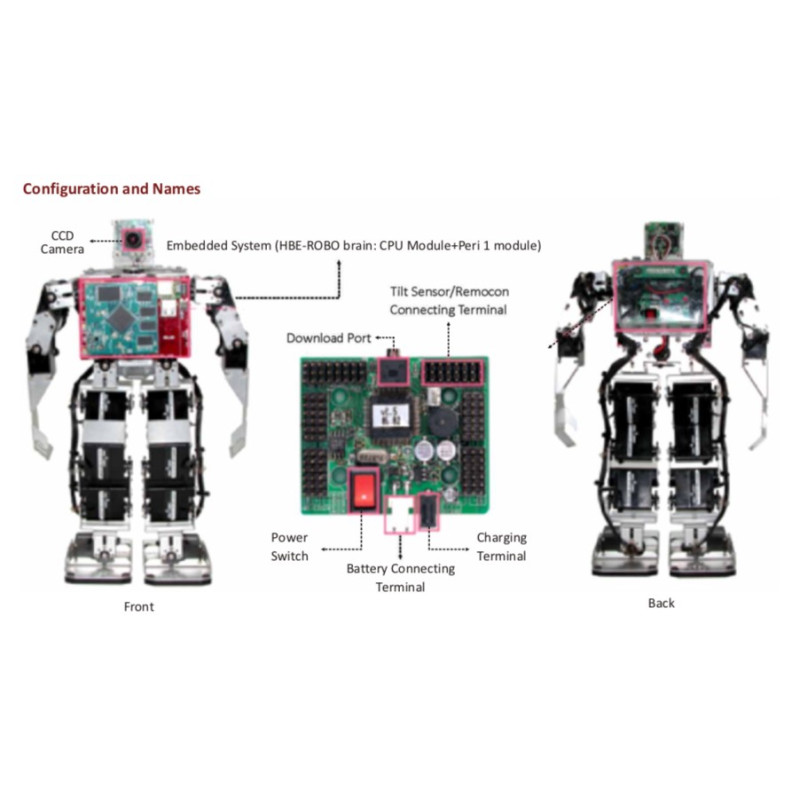
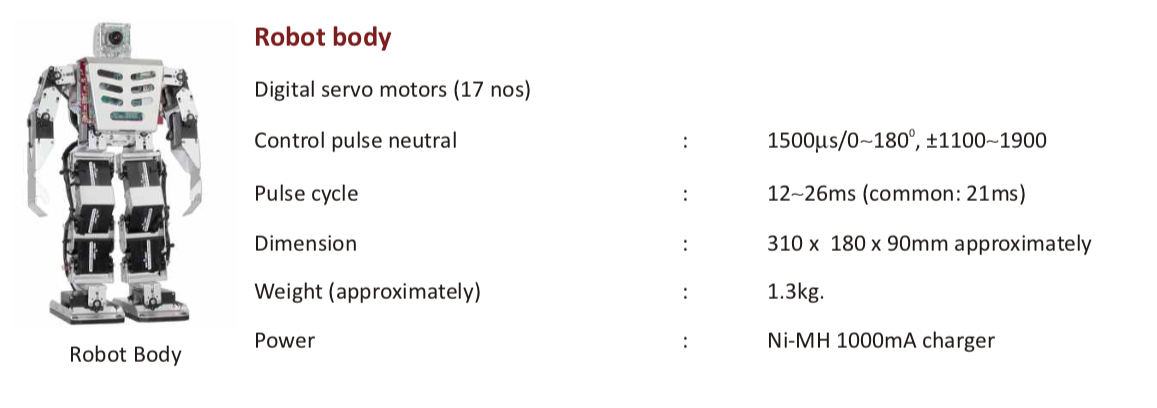
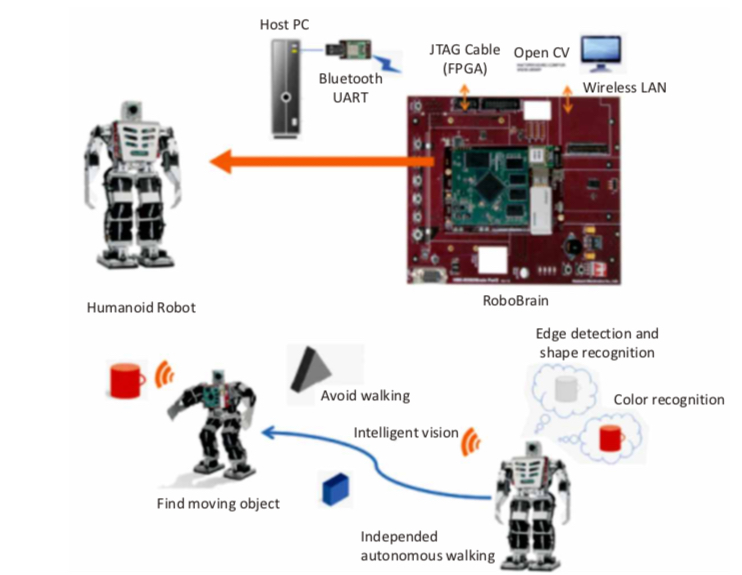
HBE-Robonova AI 3 Robot Humanoide es un robot bípedo inteligente de 16 articulaciones que incluye un procesador integrado que ejecuta algoritmos inteligentes, placa de reconocimiento FPGA de alta resolución, adquisición de imágenes CCD y procesamiento de imágenes, y una placa controladora que controla 32 servomotores simultáneamente.
HBE-Robonova AI 3 Robot Humanoide es una plataforma optimizada que proporciona movimientos inteligentes de Robot y el futuro entorno de educación inteligente del robot desde el procesamiento del algoritmo de imagen y visión.
Mediante el montaje que junta el cerebro y el módulo de visión en robot bípedo se pueden tener no sólo operaciones simples que han sido introducidos desde la PC, sino también las operaciones inteligentes.
- Uso de tecnología robusta de bastidor / motor de alta eficiencia
- Compatibilidad del control de velocidad del motor / RC por tecnología PWM
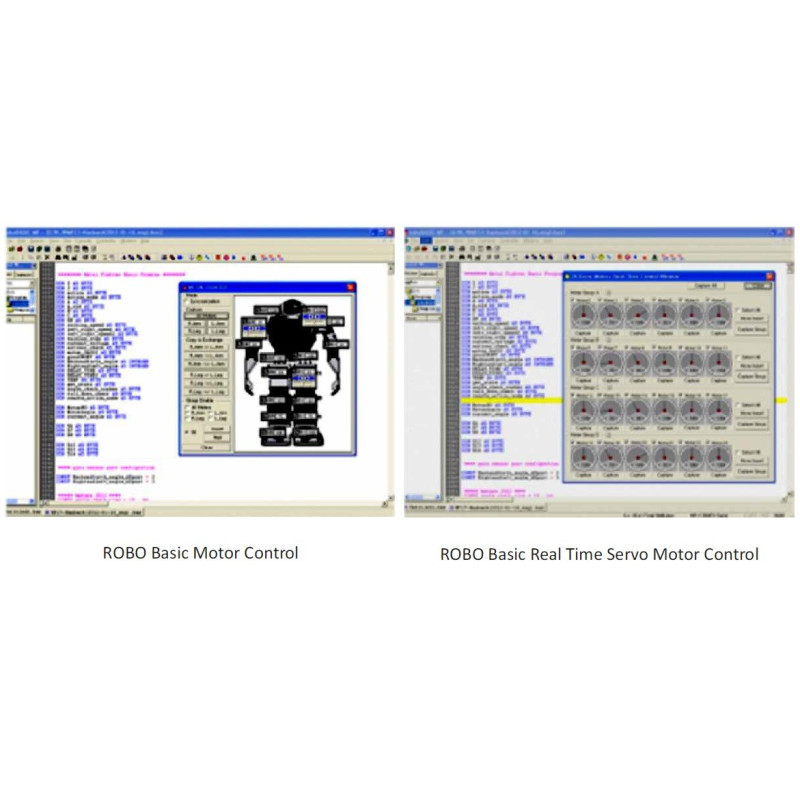
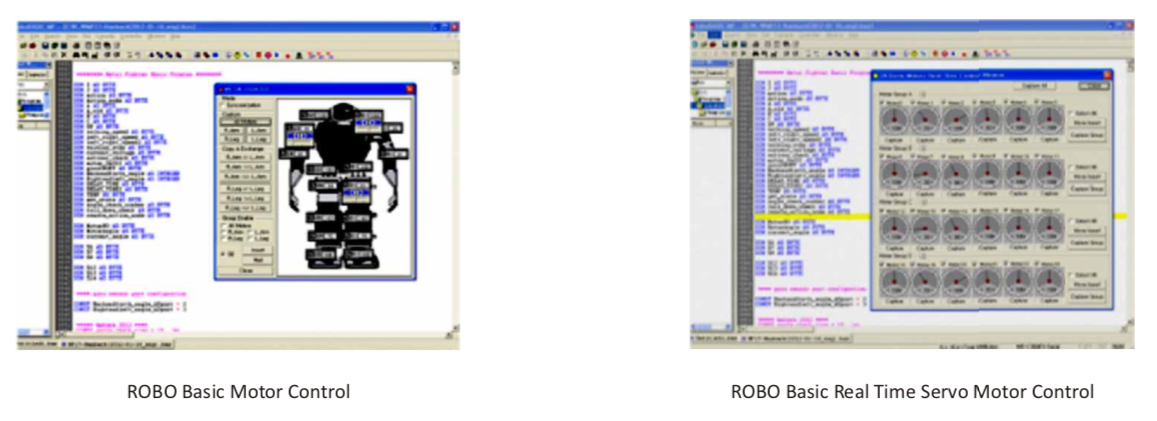
- Entorno de programa de movimiento de robot optimizado utilizando ROBO Basico y ROBO Script
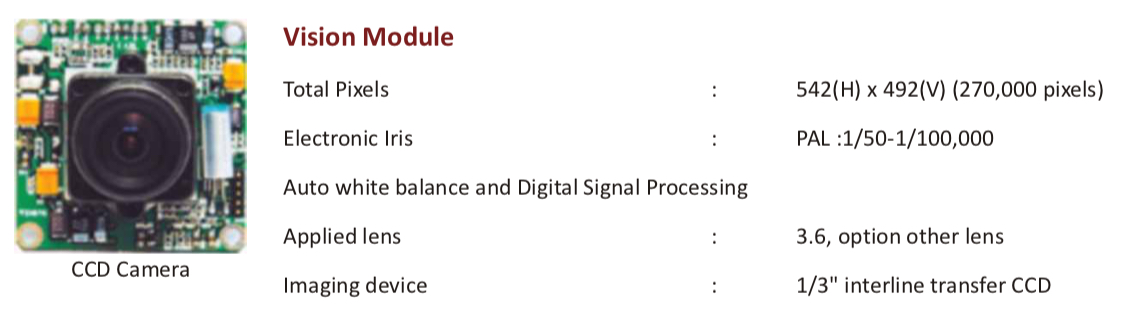
- Cámara CCD de alta resolución (Robot Visión)
- Entorno de desarrollo de programa Linux 2.6.32
- Adquisición de imagen en tiempo real y preprocesamiento usando FPGA
- Procesamiento y monitoreo de imágenes en tiempo real usando LAN inalámbrica
- Prueba de la visión del robot utilizando la biblioteca OpenCV
- Varias operaciones de movimiento (baile, luchador, juego, fútbol, modo obstáculo)
- Introducción al Robot
- Estructura del robot bípedo inteligente
- Entorno de desarrollo de Robot inteligente
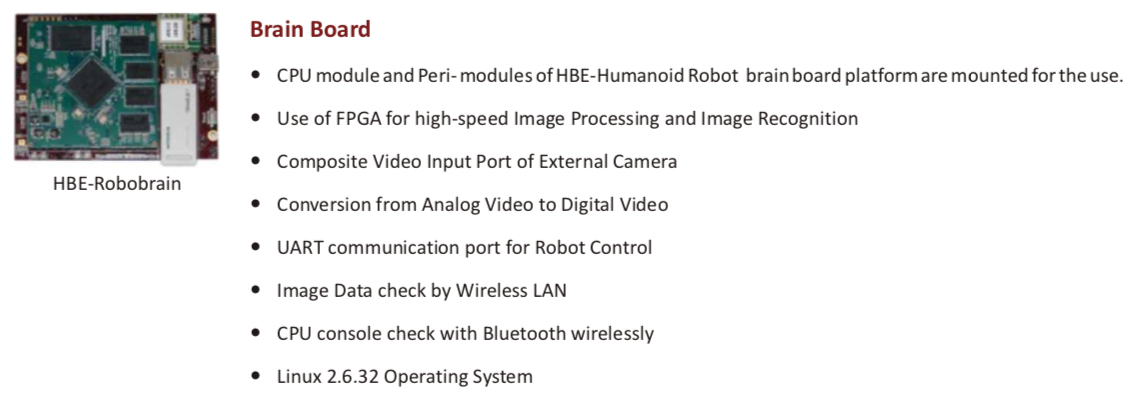
- Cerebro de robot inteligente
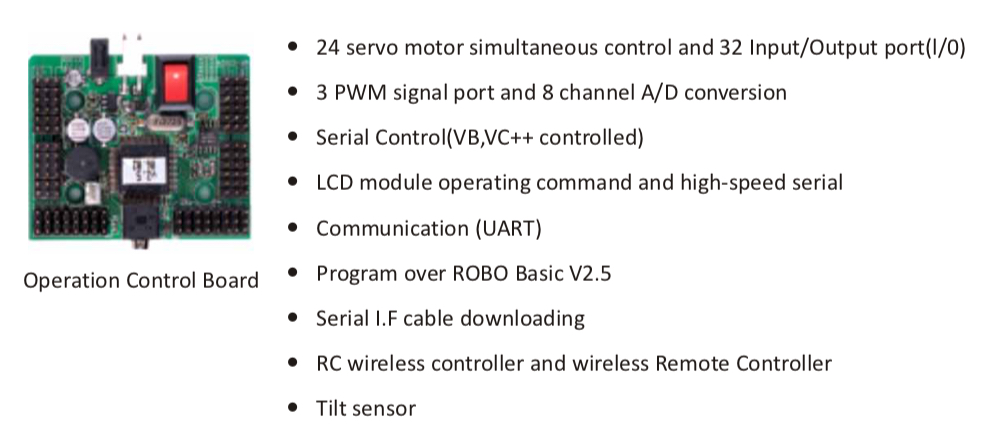
- Control del funcionamiento del robot inteligente
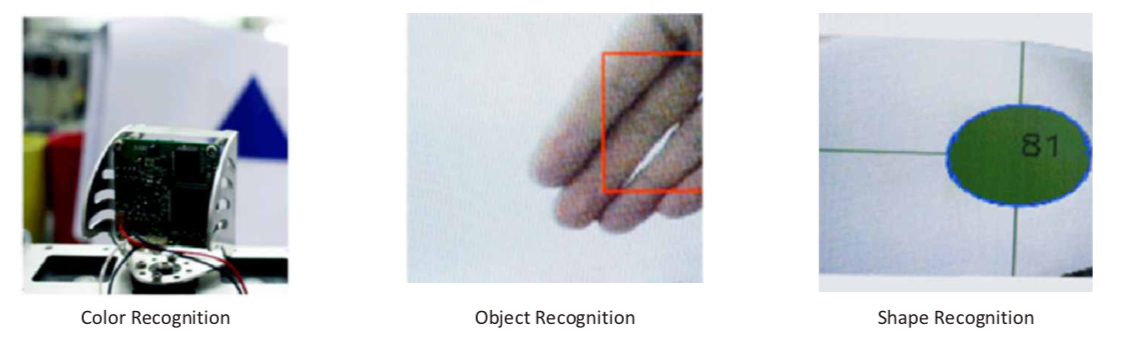
- Visión del robot inteligente
- Procesamiento de imágenes para un robot inteligente
- Robot controlado por Brillo
- Robot de reconocimiento de color
- Robot de seguimiento de objetos en movimiento
- Reconocimiento de formas robot usando circularidad
- Robot de búsqueda de posición
- TaekwonRobot
- Servidor web
- Fusión del cargador de arranque con USB OTG
- Control remoto
- Cargador
- Adaptador de AC
- Cable estéreo
- Módulo maestro de Bluetooth
- Manual de usuario
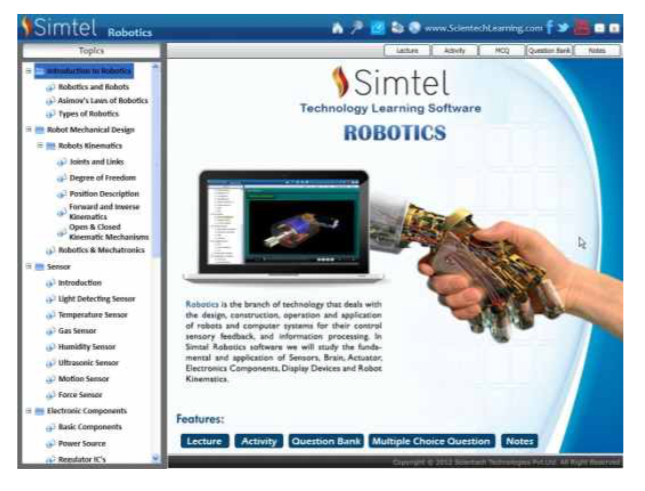
La robótica es la rama de la tecnología que se ocupa del diseño, construcción, operación y aplicación de robots y sistemas informáticos para su control, retroalimentación sensorial y procesamiento de la información. En el software Simtel Robotics estudiaremos la fundamental y la aplicación de Sensores, Cerebro, Actuador, Componentes Electrónicos, Dispositivos de Visualización y la cinemática del robot.
+ Prueba principal:
- Linux Kernel Ver.2.6.32 sistema operativo basado en la prueba de programación del sistema integrado.
- Procesamiento de preprocesamiento y reconocimiento Prueba de datos de imagen ingresados a través de FPGA (Procesador de preprocesamiento de imágenes).
- Control Inteligente de Robot por UART (Comunicación con la tarjeta de control del robot por UART).
- Prueba de procesamiento de imagen y algoritmo de visión de robot.
- Prueba de algoritmo de procesamiento, seguimiento y reconocimiento de imágenes en tiempo real utilizando la biblioteca OpenCV.
- Programación del sistema integrado, control del motor, procesamiento de imágenes y prueba combinada de control inteligente de robots.
- Aplicación a Project Test y Tema de Capstone para Robot Contest Platform (TaekwonRobot).
- Prueba de control de funcionamiento básico utilizando ROBO Básico y ROBO Script (ROBO Básico v2.8 incluye comandos sembrados para control Robot además de lenguaje Básico y proporciona ventana de control de motor en tiempo real para control de robot de múltiples juntas para una fácil programación del funcionamiento del robot)
- Prueba de control de operación del robot usando un control remoto
- Bastidor robusto / tecnología de motores de alta eficiencia
- Compatibilidad con motor Speed Control / RC mediante tecnología PWM
- Entorno optimizado del programa de movimiento del robot utilizando
- ROBO Basic y ROBO Script
- Cámara CCD de alta resolución (Robot Vision)
- Entorno de desarrollo de programas Linux 2.6.32
- Adquisición y preprocesamiento de imágenes en tiempo real mediante FPGA
- Procesamiento y supervisión de imágenes en tiempo real mediante LAN inalámbrica
- Prueba de visión de robot usando Open CV Library

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}