Carrinho de compras











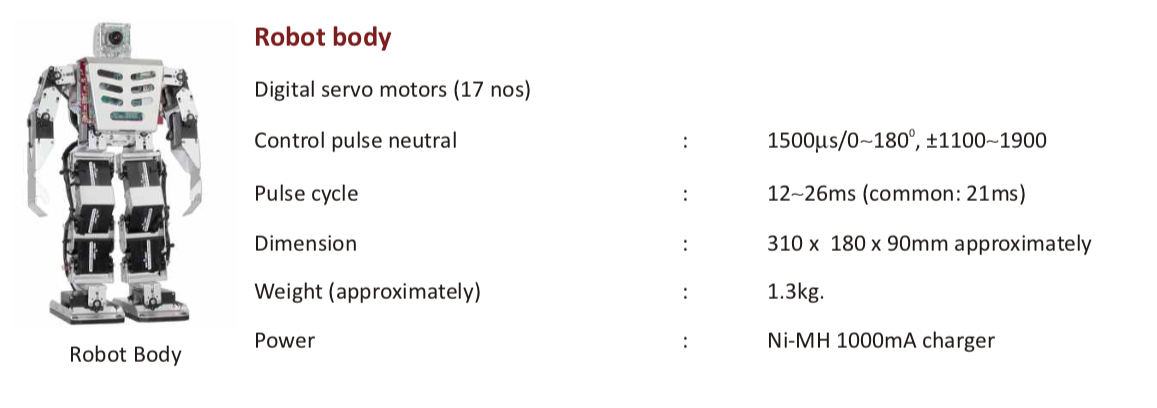
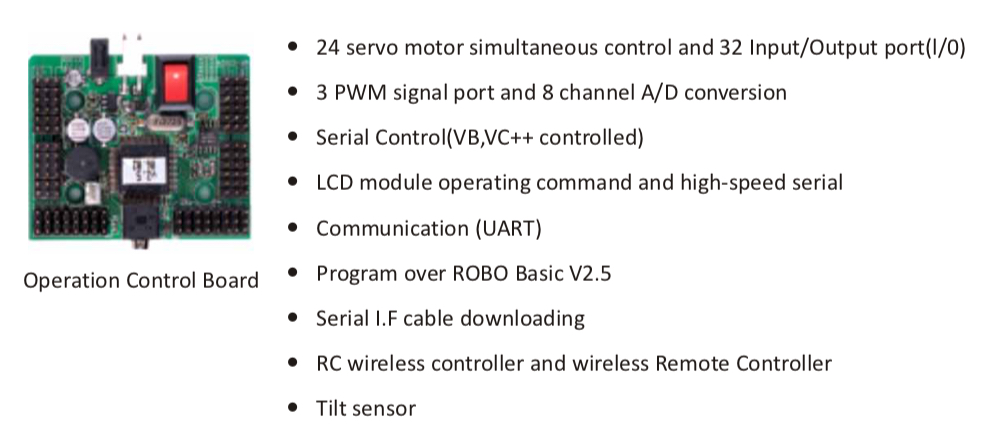
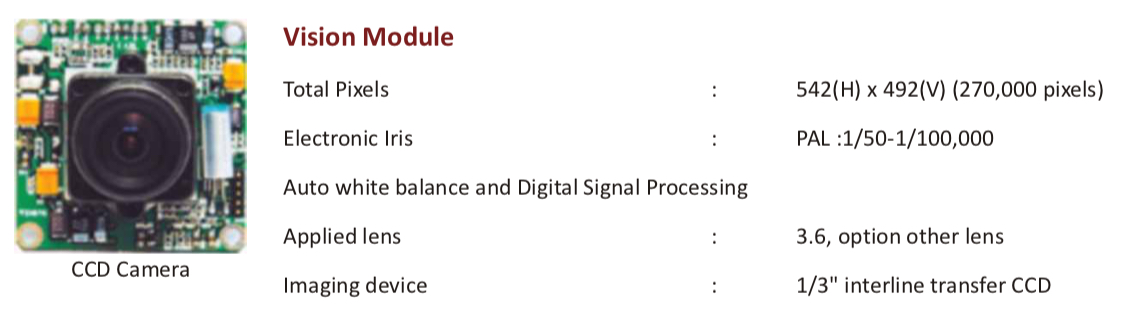
HBE-Robonova AI 3 Robô Humanóide é um robô biped inteligente de 16 articulações que inclui um processador integrado que executa algoritmos inteligentes, placa de reconhecimento FPGA de alta resolução, aquisição de imagem CCD e processamento de imagem e uma placa controladora que controla 32 servomotores simultaneamente.
HBE-Robonova AI 3 Humanoid Robot é uma plataforma otimizada que fornece movimentos do robô inteligente e futuro ambiente de educação robô inteligente do algoritmo de processamento de imagem e visão.
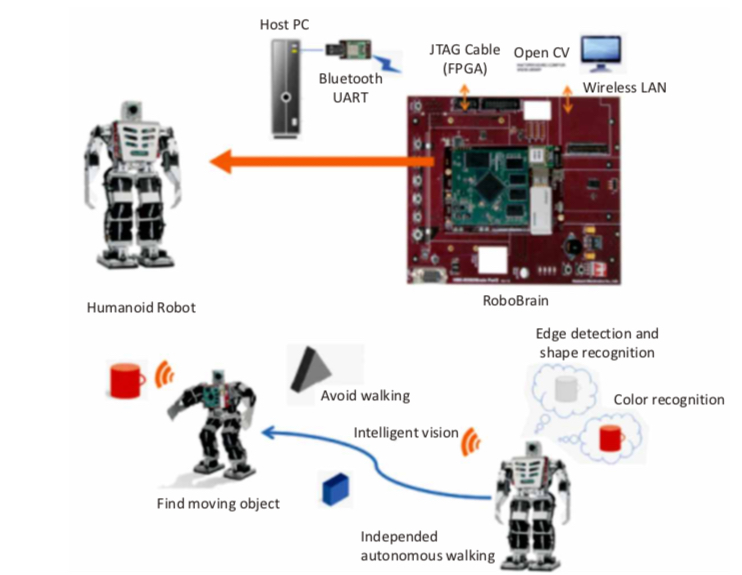
Ao montar cérebro da placa e módulo de visão bípede robô pode ser não apenas operações simples que foram introduzidas a partir do PC, mas também operações inteligentes.
- Utilização de estrutura robusta / tecnologia de motor de alta eficiência
- Compatibilidade de controle de velocidade do motor / RC com tecnologia PWM
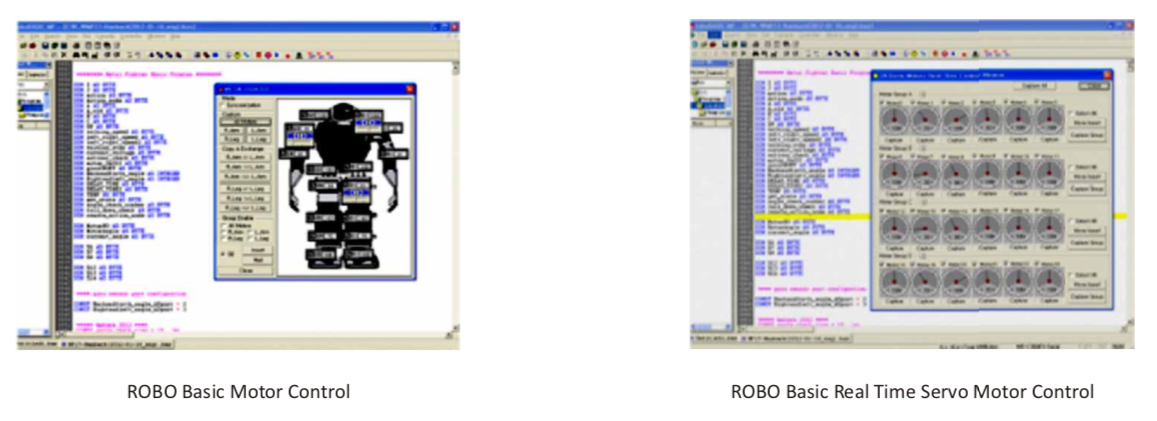
- Ambiente de programa de movimento robótico otimizado usando ROBO Basic e ROBO Script
- Câmera CCD de alta resolução (Vision Robot)
- Ambiente de desenvolvimento de programas Linux 2.6.32
- Aquisição de imagem e pré-processamento em tempo real usando FPGA
- Processamento e monitoramento de imagens em tempo real usando LAN sem fio
- Testar a visão do robô usando a biblioteca OpenCV
- Várias operações em movimento (dança, luta, jogo, futebol, o modo de obstáculo)
- Introdução ao Robô
- Estrutura do robô biped inteligente
- Ambiente de desenvolvimento Smart Robot
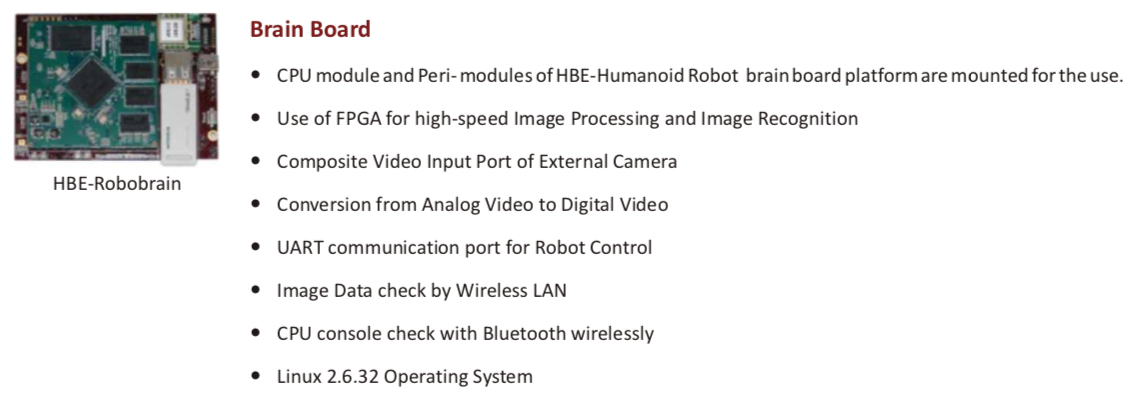
- cérebro de robô inteligente
- Controle do funcionamento do robô inteligente
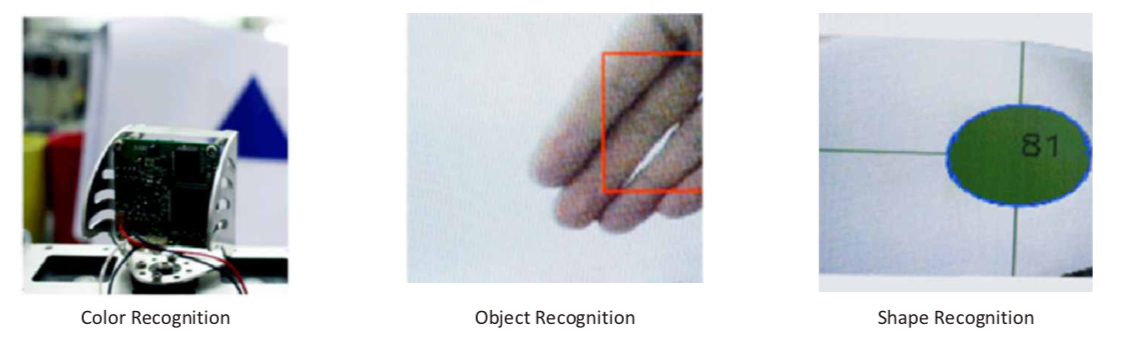
- Visão do robô inteligente
- Processamento de imagem para um robô inteligente
- Robô controlado pelo brilho
- Robô de reconhecimento de cor
- Robô rastreando objetos em movimento
- Reconhecimento de formas de robô usando circularidade
- Robô de busca de posição
- TaekwonRobot
- servidor da web
- Fusão do gerenciador de inicialização com o OTG USB
- Controle remoto
- carregador
- adaptador AC
- cabo estéreo
- módulo mestre Bluetooth
- Manual de usuário
Robótica é o ramo da tecnologia que lida com o design, construção, operação e aplicação de robôs e sistemas de computador para o seu controle, feedback sensorial e processamento de informações. No software Simtel Robotics estudaremos o fundamental e a aplicação de Sensores, Cérebro, Atuador, Componentes Eletrônicos, Dispositivos de Visualização e cinemática de robôs.
+ Teste principal:
- Linux Kernel Ver.2.6.32 sistema operacional baseado no teste de programação do sistema integrado.
- Processamento de pré-processamento e reconhecimento Teste de dados de imagem inseridos através de FPGA (processador de pré-processamento de imagem).
- Intelligent Robot Control por UART (Comunicação com o cartão de controle do robô pela UART).
- Teste de processamento de imagem e algoritmo de visão do robô.
- Algoritmo de teste para processamento, rastreamento e reconhecimento de imagens em tempo real usando a biblioteca OpenCV.
- Programação integrada do sistema, controle do motor, processamento de imagens e teste combinado de controle inteligente do robô.
- Aplicação para teste de projeto e tema Capstone para plataforma de competição robótica (TaekwonRobot).
- Teste de controle de operação básica usando ROBO Basic e ROBO Script (Basic ROBO v2.8 inclui comandos semeados para controle de robô, além de linguagem básica e fornece janela de controle do motor em tempo real para controle de robô de várias placas para fácil programação da operação do robô)
- Teste de controle da operação do robô usando um controle remoto
- Estrutura robusta / tecnologia de motor de alta eficiência
- Compatibilidade com controle de velocidade / motor RC através da tecnologia PWM
- Ambiente otimizado do programa de movimento do robô usando
- ROBO Basic e ROBO Script
- Câmera CCD de alta resolução (Robot Vision)
- Ambiente de desenvolvimento de programa Linux 2.6.32
- Aquisição e pré-processamento de imagens em tempo real usando FPGA
- Processamento e monitoramento de imagens em tempo real via LAN sem fio
- Teste de visão do robô usando Open CV Library

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}