Carrinho de compras





- Novo
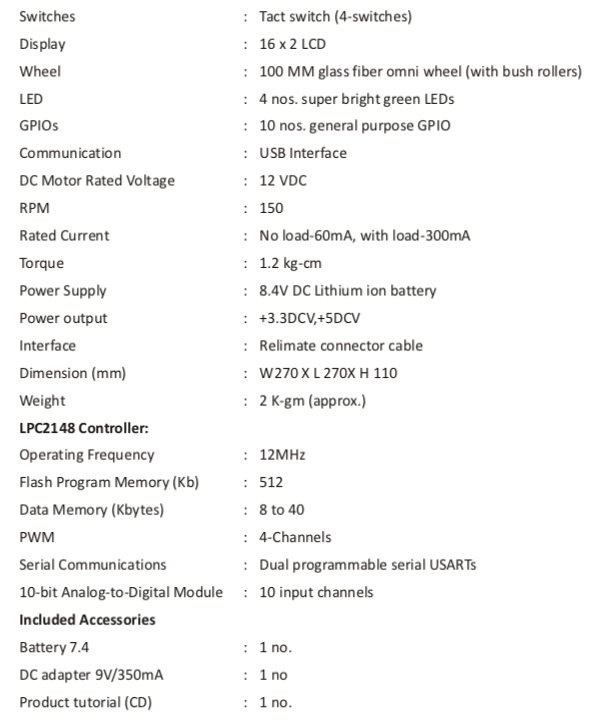
Nvis apresenta o Robocar Baseado em ARM. A Nvis Robocar é uma unidade pronta para uso que consiste em um chassi robusto, um acoplador e três rodas Omni com direção de 120 graus montada nela. A máquina é acionada por motores de corrente contínua que funcionam com baterias recarregáveis.
Este processador Nvis ARM (LPC2148) / Microcontrolador Atmega128 baseado em Arduino RoboCar, com tela LCD 16x2 que controla e depura-lo. O Robocar foi projetado para que os usuários comecem a desenvolver um robô inteligente que é capaz de controlar com o software do aplicativo Android com a ajuda do Módulo Wifi.
- Controlador ARM7 baseado no NXP LPC2148
- O módulo do controlador é removível
- Três rodas Omni para movimento em qualquer direção
- Interface LCD de 16 x 2 caracteres
- Master reset / reset key para redefinir o hardware
- Interface e controle de três motores DC
- Alterar a interface
- Conectores de expansão para sensores analógicos
- Conectores de expansão para saída PWM para servomotor
- GPIOs adicionais a bordo
- Carregador de bateria a bordo
- Na placa separada + 3.3VDC e + 5VDC
- Programação a bordo
- Cada pino é marcado para facilitar o trabalho
- Tomada de energia para o módulo wireless ZigBee / Bluetooth
- WiFi (opcional)
- processador ARM com microcontrolador
- Programação no processador ARM
- interface LCD 16x2
- interface LED
- interface do motor
- interface do motor DC
- Robô controlado por Wi-Fi / ZigBee / Bluetooth
- Robô de movimento multidirecional
- Aprenda como interconectar vários módulos de sensores






























{kind=link}
{kind=link}