Carrito



{kind=link}
{kind=link}


SISTEMAS DE ENTRENAMIENTO Y EDUCACIÓN
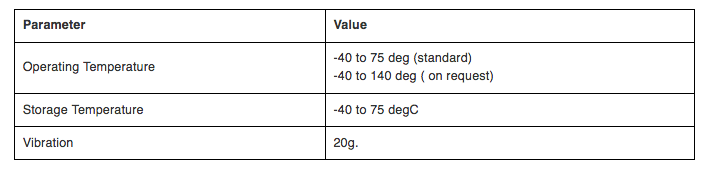
- Sensor de posición de rotativo sin contacto basado en la tenología de efecto Hall
- Linealidad precisa hasta 1% F.S. o 0.5% F.S (bajo petición)
- Extremadamente larga vida.
- Extremadamente compacto en tamaño.
- Ángulo programable según el requisito específico del cliente
- Cortocircuito protegido. (Para versiones de salida de 5Vdc y PWM).
- Sobretensión protegida. (Para versiones de salida de 5Vdc y PWM).
- Polaridad inversa protegida. (Para versiones de salida de 5Vdc y PWM).
- El kit de sensor giratorio se utiliza para detectar el ángulo del sistema que se corresponde con el movimiento rotativo del eje del senso
- RSSK-12 es un kit completo desmontado para facilitar el montaje y el montaje preciso del sensor
- Con el kit desmontado es muy atractivo para la aplicación que exige un par extremadamente bajo
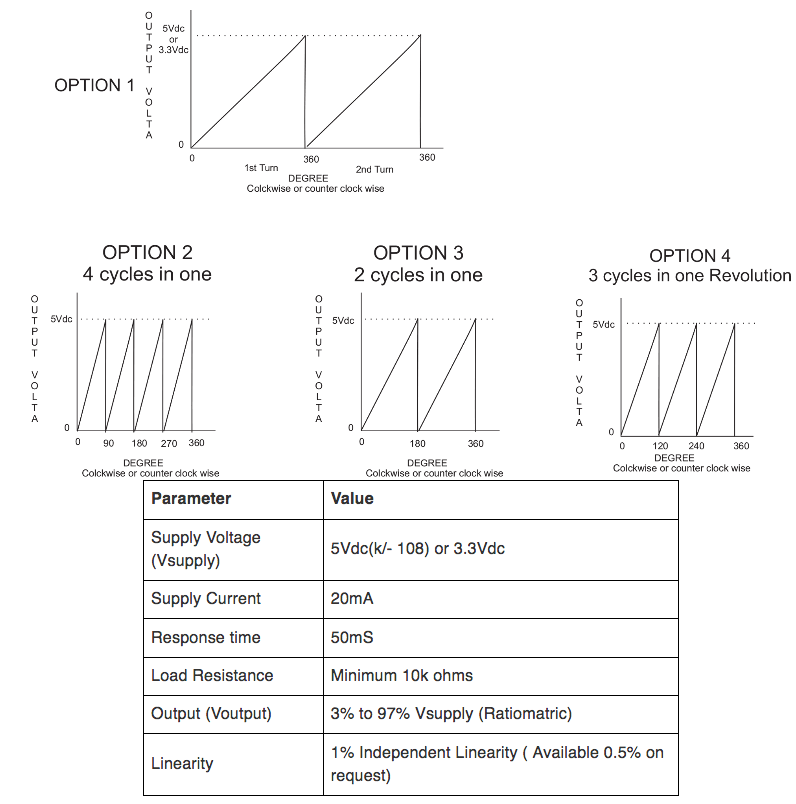
- La señal de salida corresponde a 0 a 360 grados. Este rango completo es programable según los requisitos.
- Debido a que el Producto se basa en el efecto de la Tecnología de Hall sin contacto, tiene una vida muy larga.
- El sensor rotatorio sin fin se puede programar especialmente para tener 4,3 o 2 ciclos en revoluciones por lo tanto aumenta la precisión.
- Para los microcontroladores modernos, RSSK-12 es capaz de dar salida en 0 a 3.3Vcc y para suprimir el efecto de la versión de salida de Noise PWM está disponible.
- 12 bits de resolución 0 a 3.3Vdc analógico Proporción de salida matricial.
- 12 bits de resolución 0 a 5 V CC analógico Proporción de salida matricial.
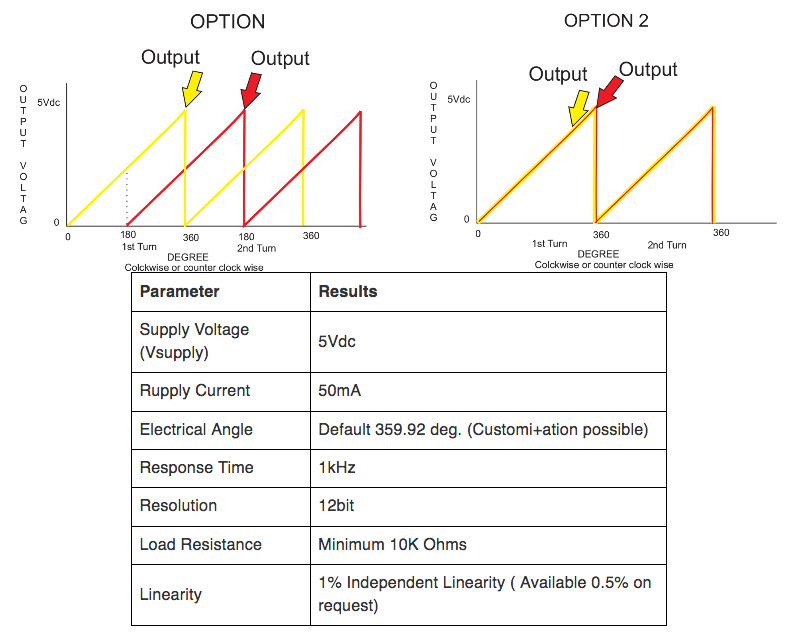
- 12 bits de resolución Relación de 0 a 5 Vdc Salida analógica dual matricial.
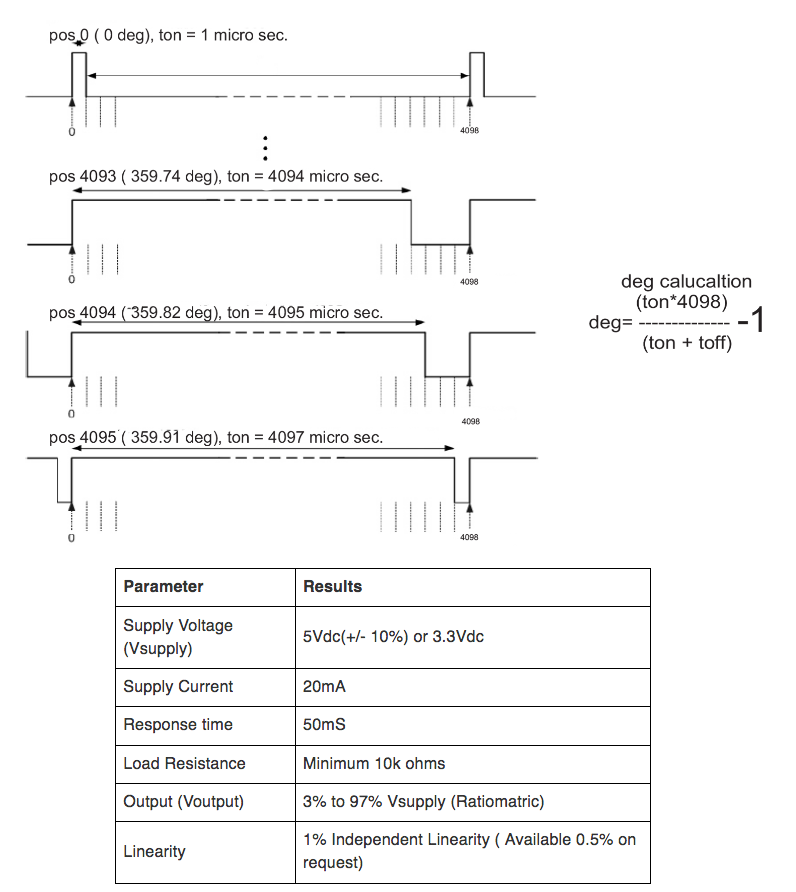
- Salida de PWM con resolución de 12 bits.
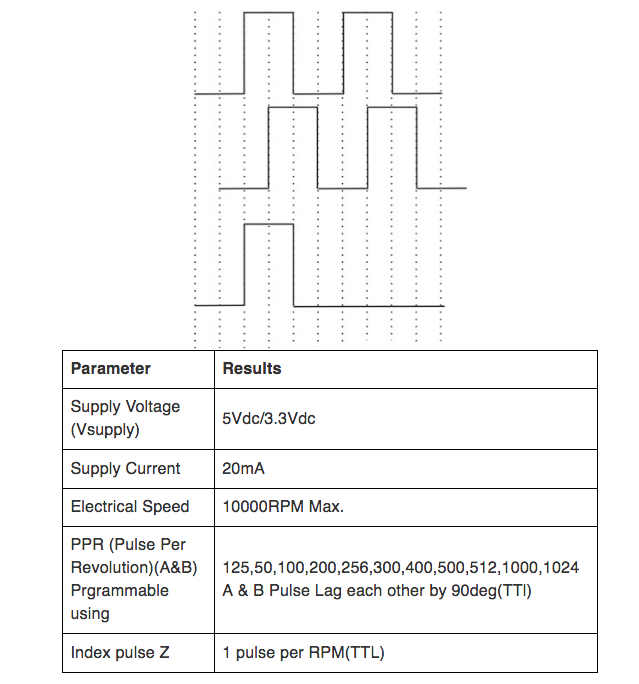
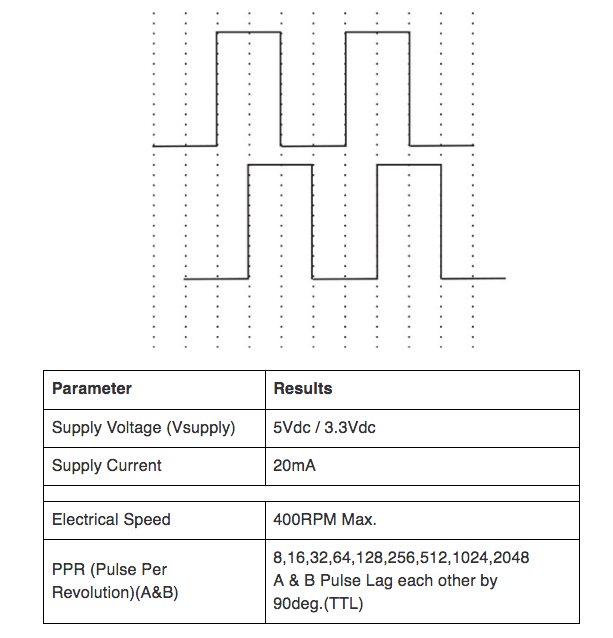
- Salida incremental con máx. 256 ppr en una revolución.
- Interfaz SPI de resolución de 14 bits.
- Interfaz I2C con resolución de 14 bits.
- Versiones de manguitos de manguito, montaje servo, brida y rodamientos de bolas.
- Conectores o cable blindado disponible.
- Protección IP 69k disponible
- 12 bits de resolución 0 a 3.3Vdc analógico Proporción de salida matricial.
- 12 bits de resolución 0 a 5 V CC analógico Proporción de salida matricial.
- 12 bits de resolución Relación de 0 a 5 Vdc Salida analógica dual matricial.
- Salida de PWM con resolución de 12 bits.
- Salida incremental con máx. 256 ppr en una revolución.
- Interfaz SPI de resolución de 14 bits.
- Interfaz I2C con resolución de 14 bits.
- Versiones de manguitos de manguito, montaje servo, brida y rodamientos de bolas.
- Conectores o cable blindado disponible.
- Protección IP 69k disponible
-- Técnico:
Si se van a instalar dos unidades RSSK12 a menos de 2 pulgadas (medido entre el centro de ambos ejes), se debe instalar un protector magnético, como una pequeña placa de acero, para evitar que un codificador cause pequeños cambios en las posiciones reportadas. ition a través del campo magnético c ros s -tal k.


-- Mecánico:
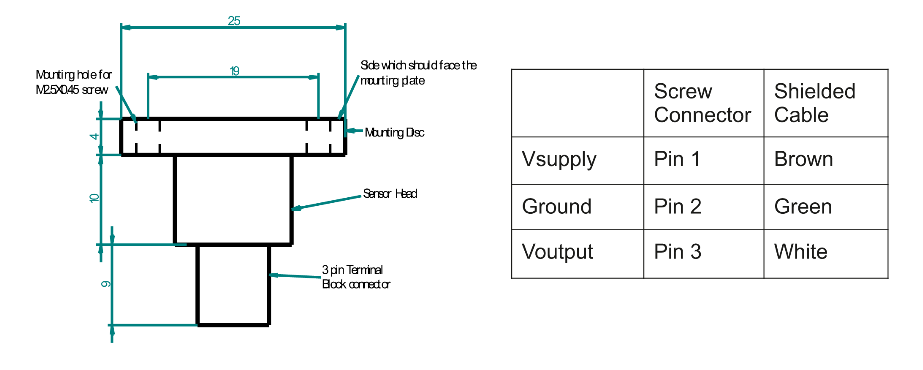
RSK-12 es un kit de sensor rotatorio compuesto principalmente de tres partes y el mismo se puede montar en tres pasos.
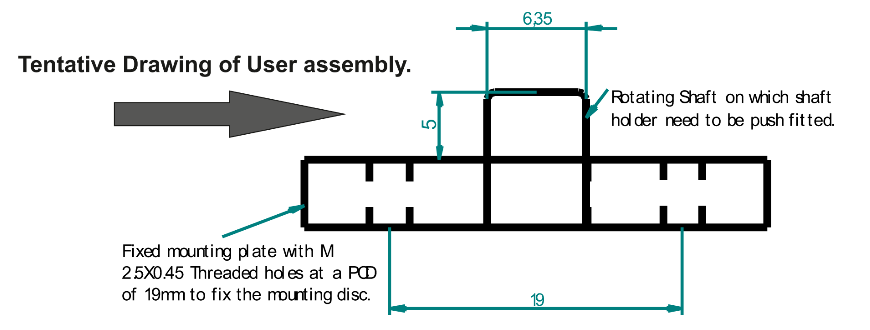
Paso 1: Montaje del soporte del eje: Empuje Coloque el soporte del eje en el eje con una altura máxima de 5 mm con un Diámetro del eje (6.3 + 0.02 mm) con un juego radial máximo permitido de 0.2 mm. Cuanto menor sea el juego radial mayor será la precisión. La personalización del soporte del eje es posible.
Paso 2: Montaje de la cabeza del sensor: en el soporte del eje, mantenga la cabeza del sensor de manera que el soporte del eje entre en la cabeza del sensor.
Paso 3: Montaje del disco: En el cabezal del sensor, inserte el disco de montaje de manera que el paso en el disco de montaje quede orientado hacia la placa de montaje y apriete el tornillo en un PCD de 19 mm. Tenga en cuenta que puede
-- Variantes eléctricas:
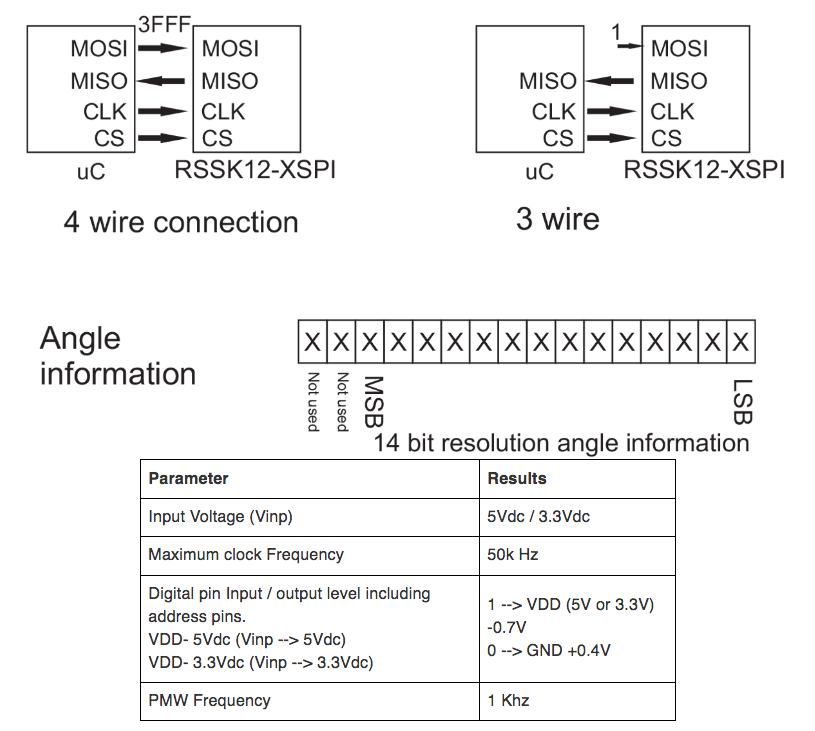
- El RSSK12-XSPI es un codificador Absoluto que actúa como esclavo y se comunica con el microcontrolador maestro según el protocolo estándar de SPI.
- Según el protocolo estándar de SPI RSSK12-XSPI se comunica con el protocolo maestro cuando el pin MOSI está activo alto o se envían datos 3FFF hex en el bus y el pin CS necesita alternar de bajo a alto para un solo pulso de reloj.
- RSSK12-XSPI se comunica en 16 bits de transmisión. Después de cada ciclo de comunicación, es obligatorio alternar el pin CS de mayor a menor.
- RSSK12-XSPI tiene una provisión de comunicación de primera salida SPI y modo de comunicación PWM de 14 bits y 12 bits de resolución, respectivamente.
- El número de sensores se puede conectar en el modo de conexión en cadena de 4 hilos o (n + 3 conexiones de cables). póngase en contacto con el Sr. Pavan Kinariwala (pavankinariwala@gmail.com) para obtener más información sobre el mismo.
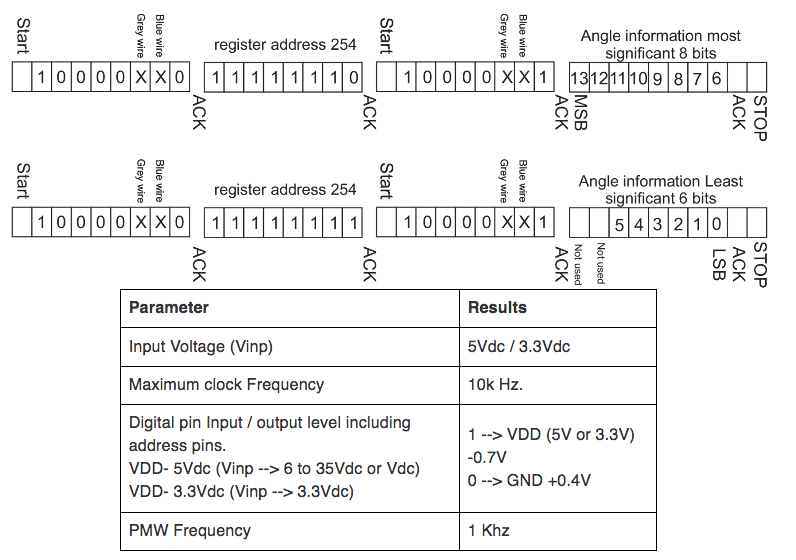
- El RSSK12-XI2C es un codificador Absoluto que actúa como esclavo y se comunica con el microcontrolador maestro según el protocolo estándar de I2C. También se conoce como comunicación de dos hilos
- RSSK12-XI2C se comunica en 8 bits de transmisión. RSSK12-XI2C tiene una provisión de comunicación I2C de salida doble y modo de comunicación PWM de 14 bits y resolución de 12 bits respectivamente
- Según el protocolo estándar, cada esclavo (RSSK12-XI2C) tiene una dirección de esclavo de 7 bits que está compuesta por dos patillas de dirección 1 y 2, mientras que los 4 bits restantes son siempre 0 y MSB es 1. Las patillas de dirección 1 y 2 son menos un poco significativo de Dirección. Por lo tanto, podemos usar la máxima
- RSSK12-XI2C comunica la información de ángulo en dos ciclos. Al enviar la dirección de registro 254 y 255. Para tener la información de ángulo completa, necesitamos eliminar dos bits más significativos (6 y 7) del byte de datos que recibimos después de enviar la dirección de registro 255.